Tanımlama
OGUROB KAPI adı verilen veri kümesi ROS robot ara yüzü ve GAZEBO benzetim ortamı kullanılarak oluşturulmuştur. Pioneer P3-AT gezgin robotun üzerine yerleştirilen Asus Xtion Pro derinlik algılayıcı ile benzetim ortamında modellenen açık kapılardan nokta bulutu verileri toplanmıştır. Veri toplama aşamasında OpenCV ve PCL gibi görüntü ve nokta bulutu kütüphaneleri kullanılmıştır.
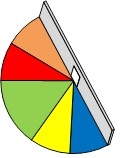
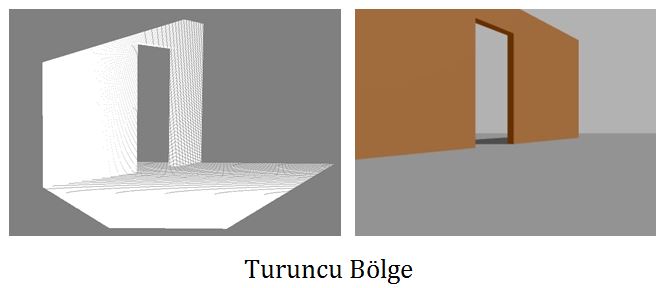
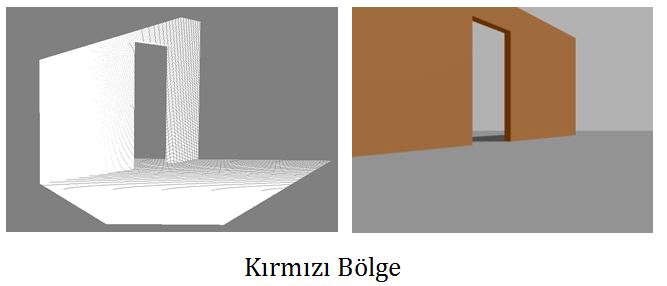
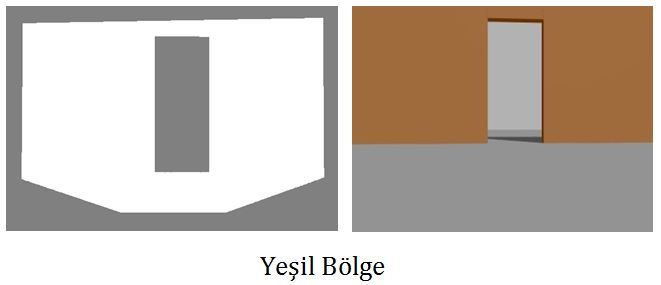
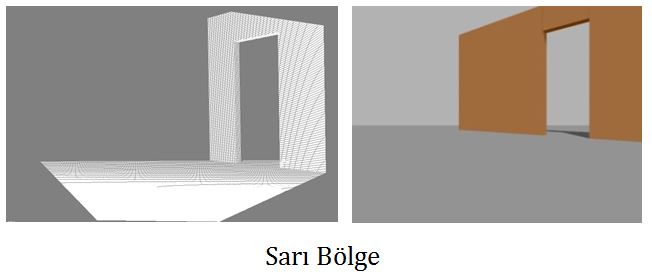
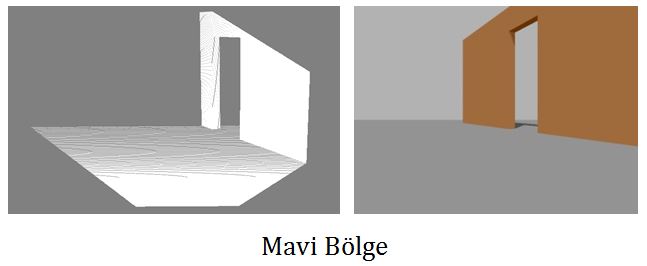
ESOGU KAPI veri kümesinde 5 farklı bölgeden açık kapı içeren 42 adet sahne bulunmaktadır. Her sahne için nokta bulutu dosyası (transformed_cloud_scene_id.pcd) ve RGB imge dosyası (RGB_scene_id.jpg) verilmiştir. Turuncu bölgede robot ile kapı arasındaki açı 0-30 derece arasındadır. Bu bölgeden 5 sahne alınmış ve kimlik numaraları 0 ile 4 arasında verilmiştir. Kırmızı bölgede robot ile kapı arasındaki açı 30-60 derecedir ve sahnelerin kimlikleri 5 ile 11 arasındadır. Yeşil bölge, robot ile kapı arasındaki açının 60-120 derece olan ve kimlikleri 12-29 arasında olan 18 sahne içermektedir. Sarı bölgede kimlik numaraları 30-36 arasında değişen 7 örnek robot ile kapı arasında 120-150 derece olduğu bölgeyi temsil etmektedir. Mavi bölgede robot ile kapı arasındaki açı 150-180 derece arasındadır ve bu bölgede kimlik numaraları 37-41 arasında değişen 5 sahne yer almaktadır. Her bir bölge için örnekler aşağıdaki şekillerde gösterilmiştir. Soldaki resimler RGB imge dosyasını sağdaki resimler ise nokta bulutunu göstermektedir.
Download
OGUROB KAPI Veri Kümesi buradan indirebilirsiniz.