Description
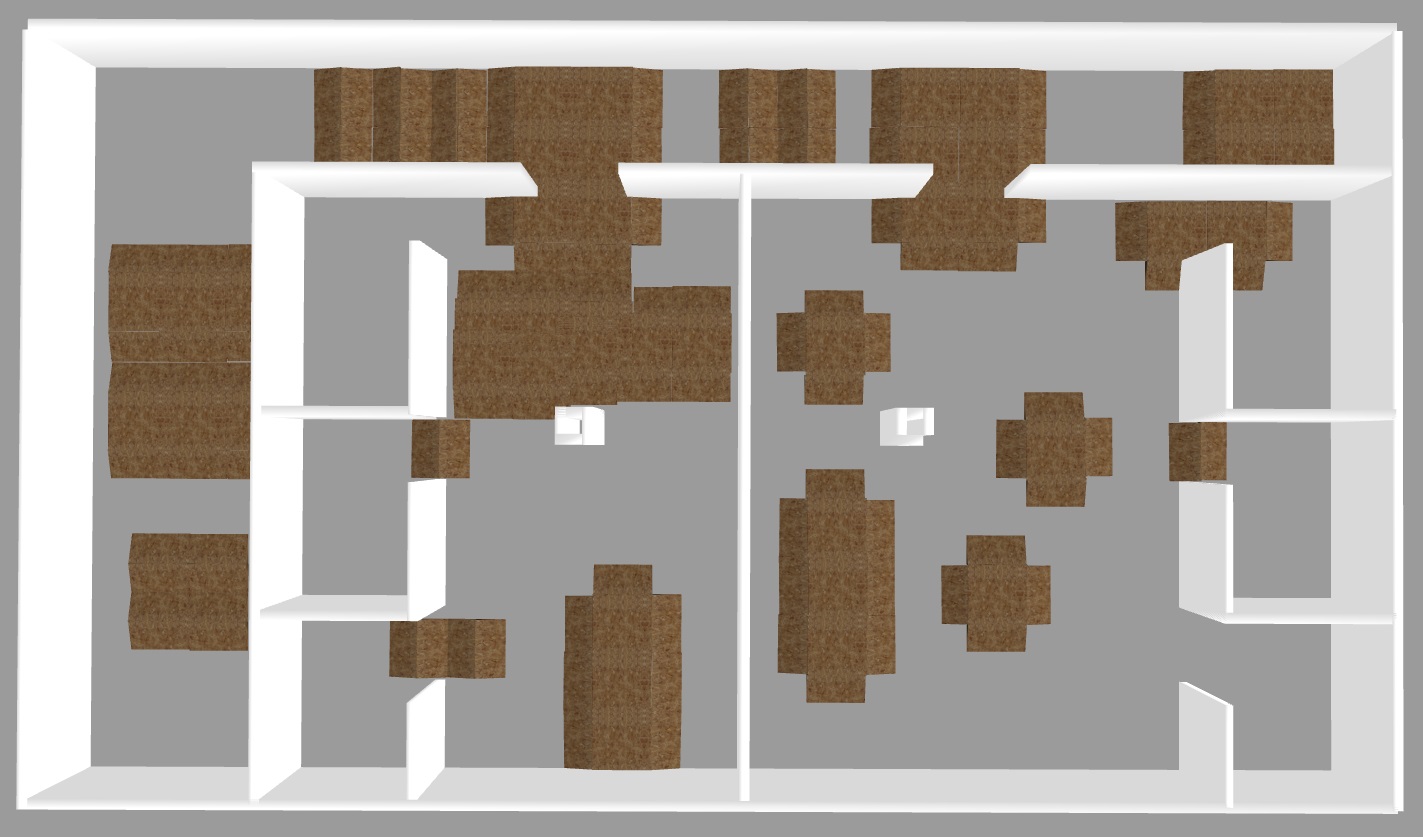
To construct the ESOGU RAMPS dataset, Gazebo simulation environment and ROS robot interface are used. In the first stage, we modelled the ESOGU Electrical & Electronics Engineering Laboratory Building in Gazebo simulation environment. Then, we exploited hector_nist_arenas_gazebo ROS package to include the National Institute of Standards and Technology (NIST) reference test ramps (continous, crossing and flat) into the simulation environment. The simulation environment is given in the following figure. A Pioneer P3-AT mobile robot with Asus Xtion Pro RGB-D sensor is used to create the dataset.
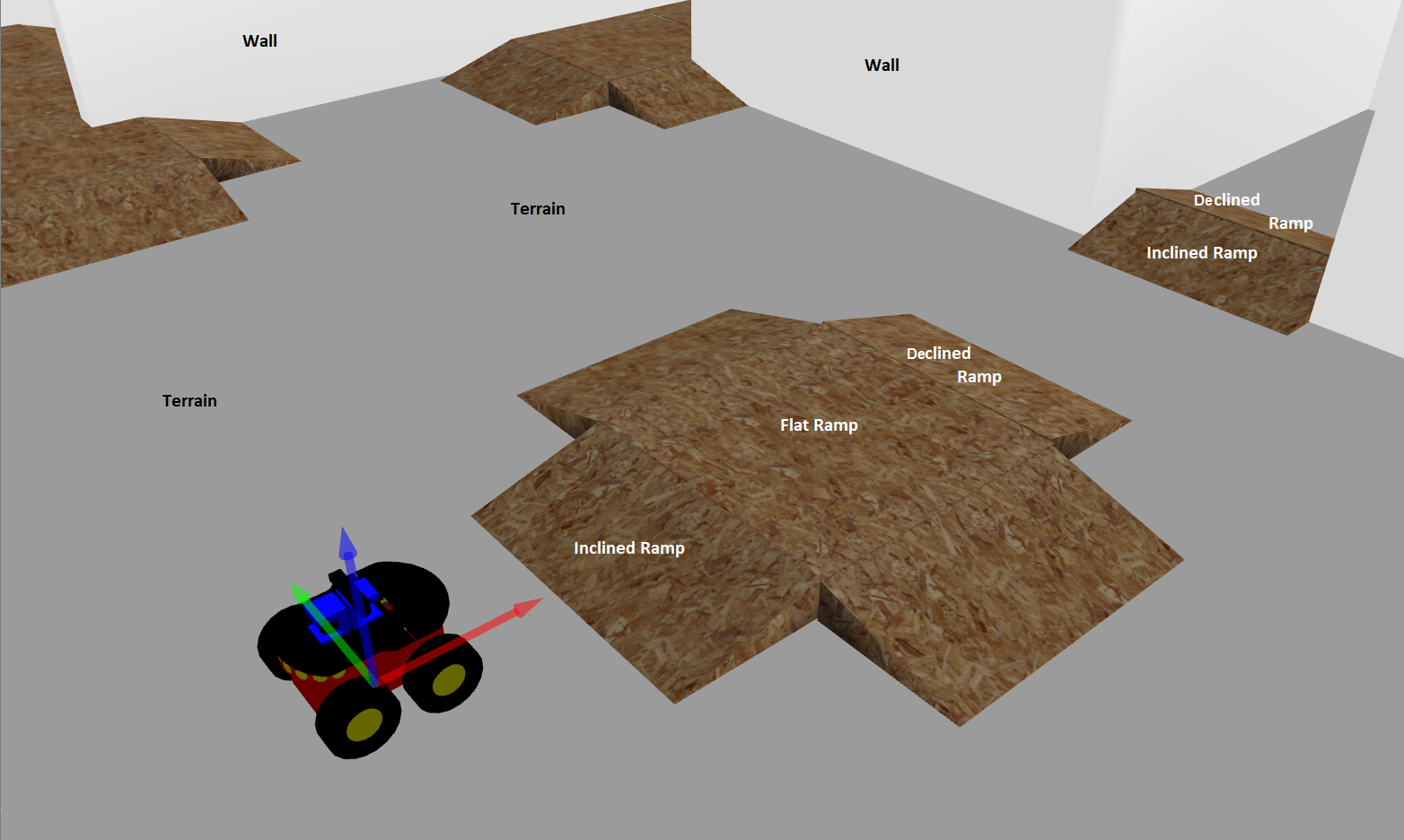
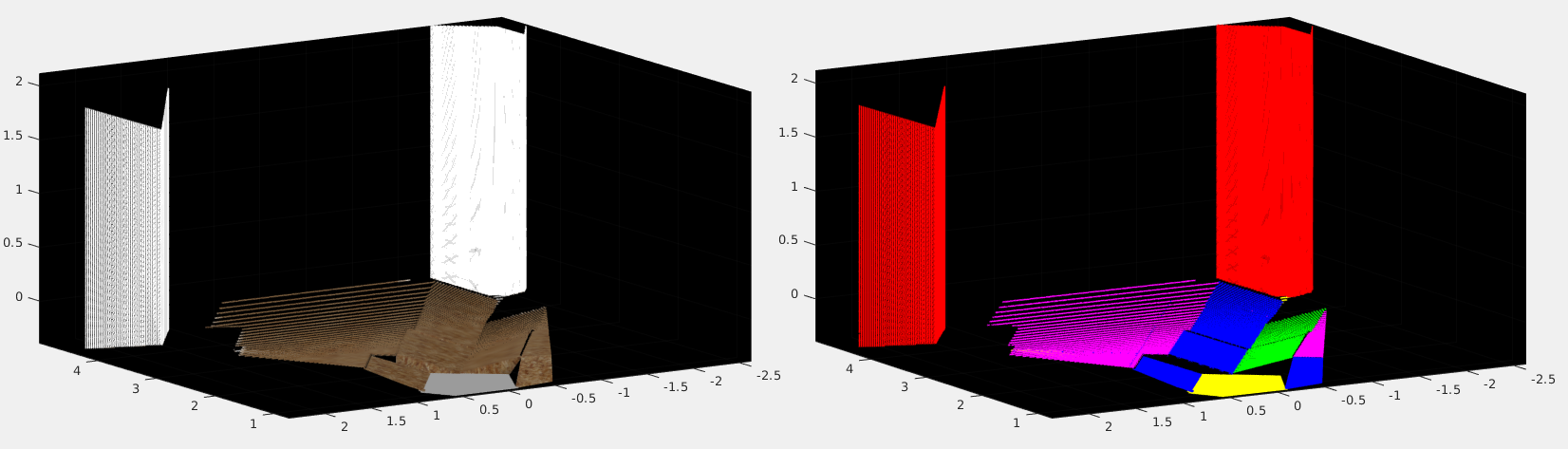
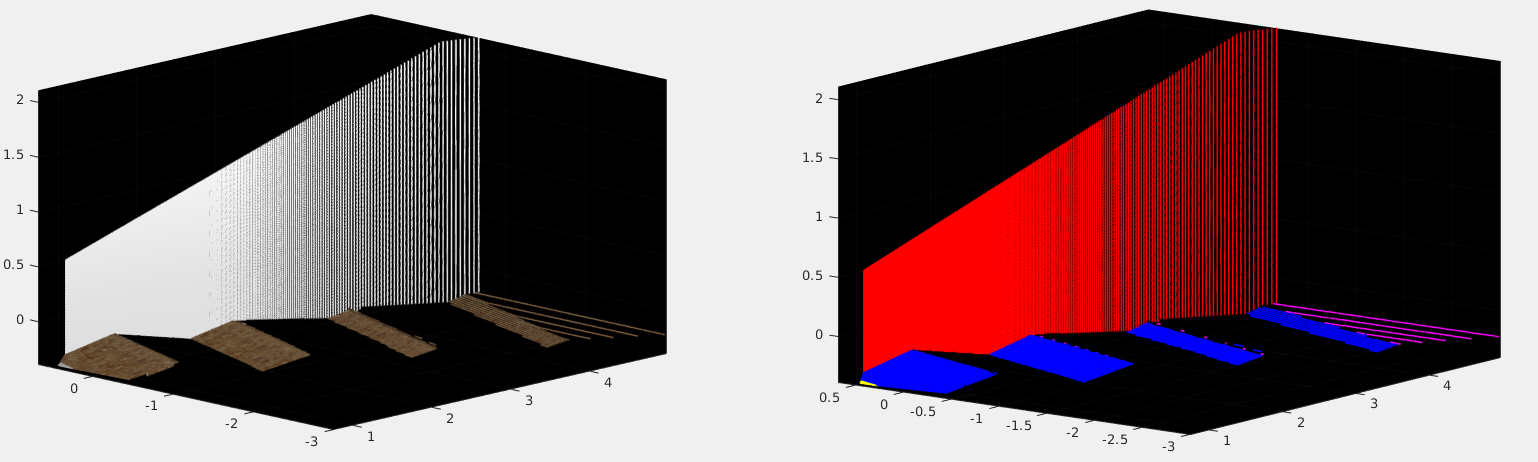
We located the robot in different positions and orientations and captured scenes via PCL. In these scenes, points must belong to one of the five classes: wall, terrain, inclined ramp, flat ramp, and declained ramp. The following figure shows examples for wall, terrain, inclined ramp, flat ramp, and declined ramp classes. In ESOGU RAMPS dataset, there are 681 scenes and point cloud and image data dormat are 480x640. For each scene, point cloud file (cloud_scene_id.pcd), RGB image file (RGB_scene_id.txt) and label file (labels_scene_id.txt) are provided.
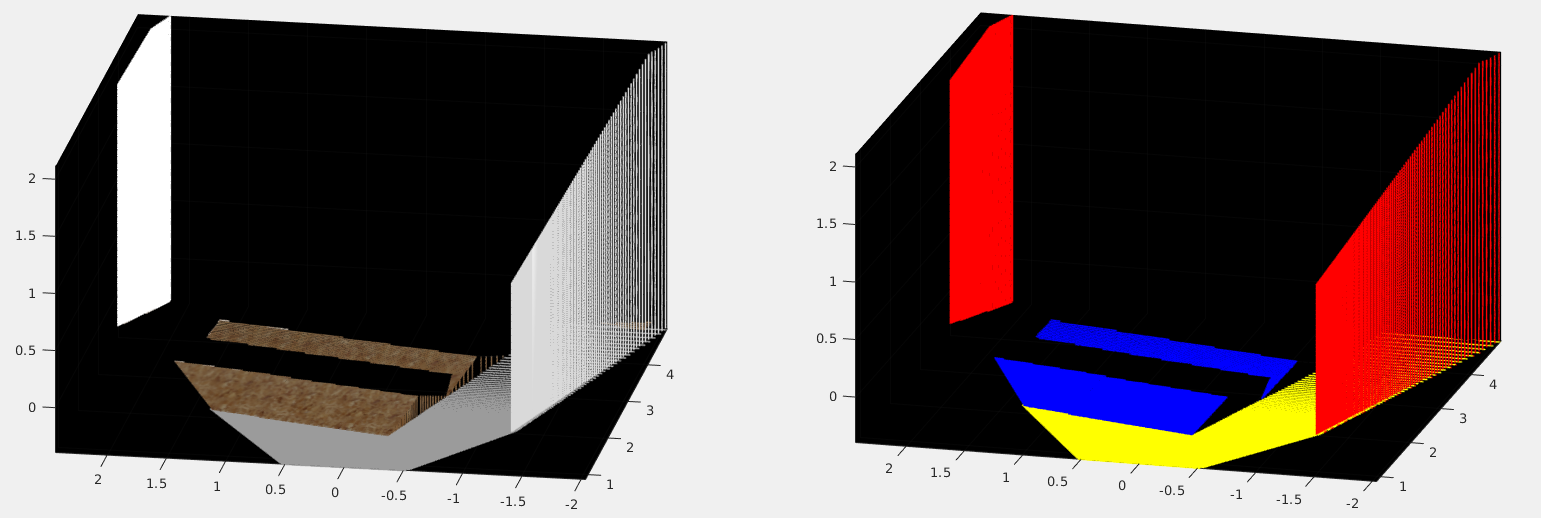
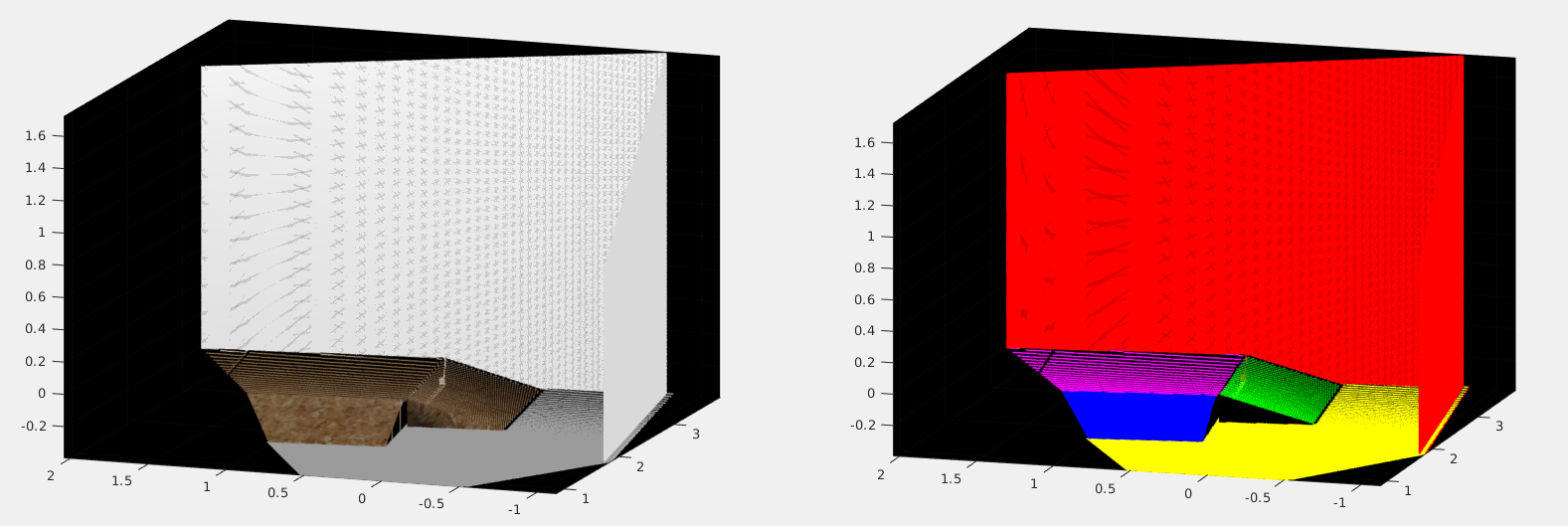
The following figure shows examples from the labelled dataset. The right column of the figure depicts examples of ground truth of the scenes. In these figures, blue, green, red, magenta, and yellow represent inclined ramps, declined ramps, walls, flat ramps, and terrain classes, respectively. In the left column, the raw point cloud is indicated.
You can download ESOGU RAMPS dataset.
Paper
This dataset was used to produce the semantic classification of the ramps in our paper. If you use the dataset, please cite:
@article{Turgut_Kaleci_2019,
title={A PointNet Application for Semantic Classification of Ramps in Search and Rescue Arenas},
author={Turgut, Kaya and Kaleci, Burak},
journal={International Journal of Intelligent Systems and Applications in Engineering},
volume={7},
number={3},
year={2019},
mount={Sep.},
pages={159-165},
url={https://www.ijisae.org/IJISAE/article/view/1022},
DOI={10.18201/ijisae.2019355378}}